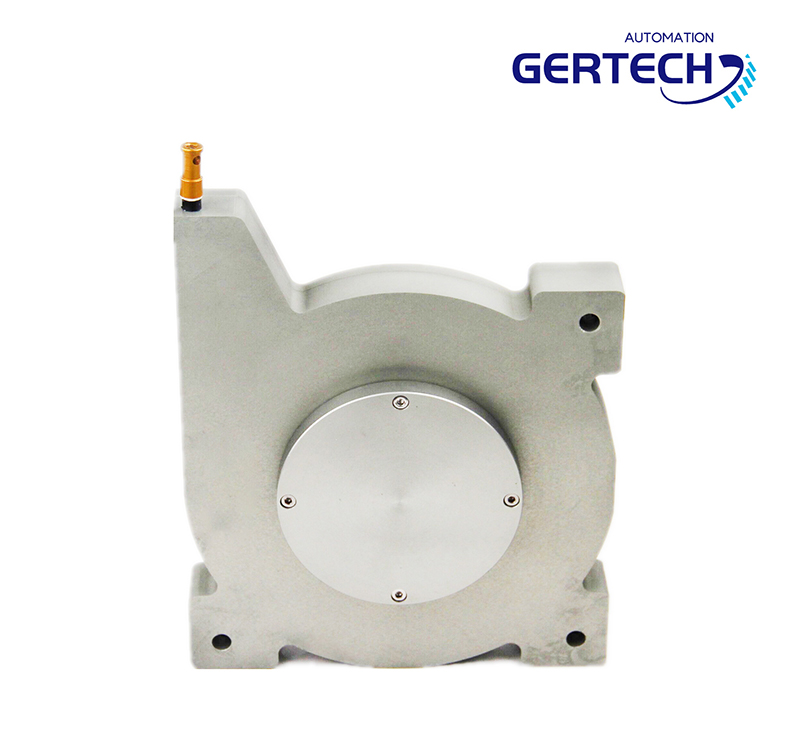
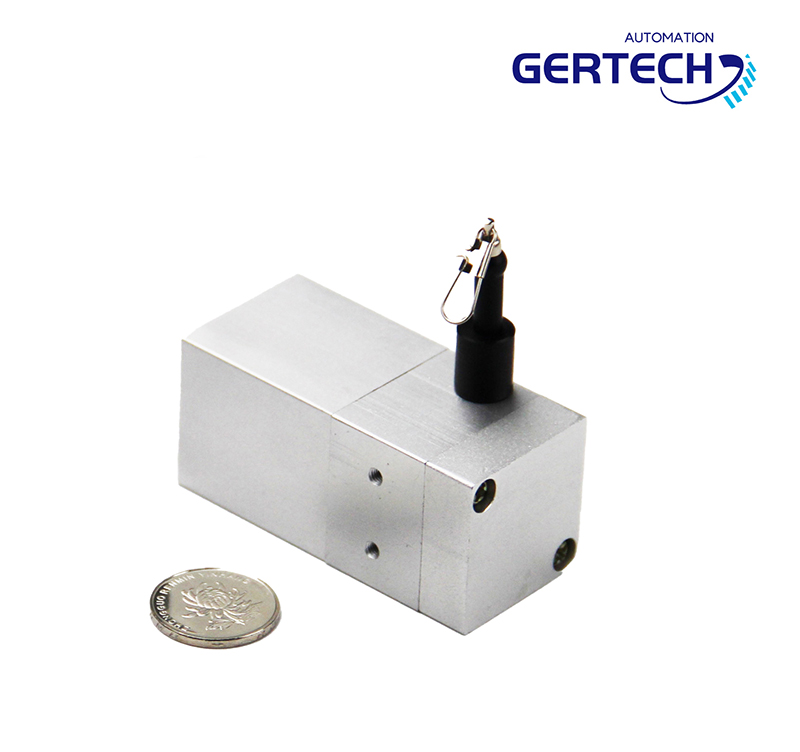
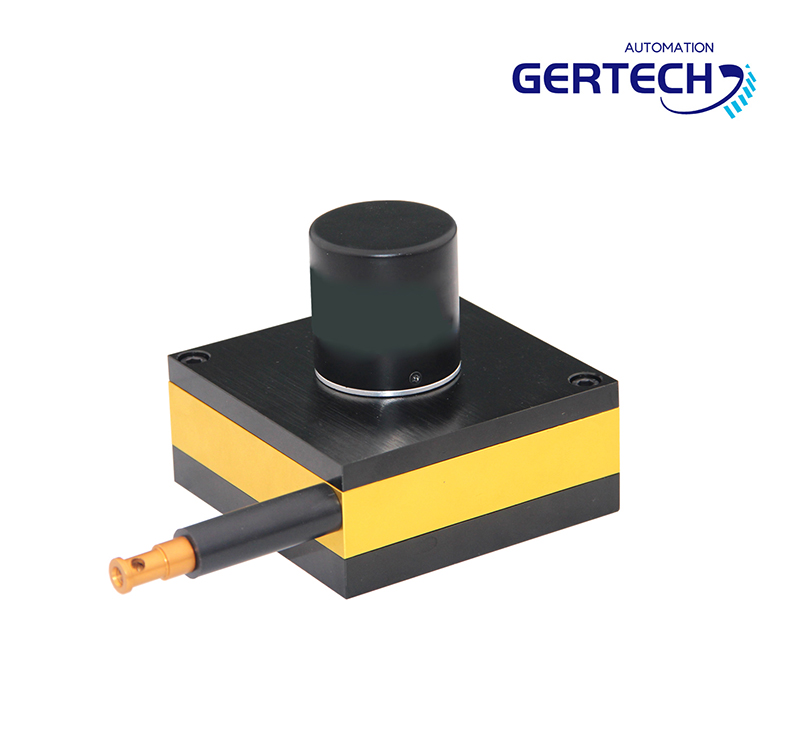
GE-A Series Sine/Cosine Output significationibus Apparatus Type Encoder

GE-A Series Sine/Cosine Output significationibus Encoder
Summus praecisio celeritas et Position Sensor cum Sine / Cosine Output, Support online lusione functionis
Applicatio:

Fusum - Motor CNC Machina Mobilitate mensurae Positioning
n
n Energy et potentia systemata generationis
n ferriviaria armorum
n Elevators
General Description
GE-A Gear Type Encoders non-contactus incrementales encoders sunt pro celeritate gyratorio ac mensurae positionis. Ex singularissima Tunneling Magnetoresistantia (TMR) Gertech technicae sensoris, peccatum differentiale orthogonale/cos significationibus magna qualitate praebent, cum indice signo et significationibus inversis. GE-A series ad 0.3~1.0-modules anni diversis numeris dentium designatae sunt.
Features
Output signo amplitudinis in 1Vpp magna qualitas
Princeps frequency responsionis ad 1MHz
Temperatus range operans ab -40°C ad 100°C
IP68 praesidium gradus
commoda
n signati habitationi cum metallo causa ut summum praesidium gradu
n Mensuratio contactus, abrasio et vibratio liberae possunt laborare in asperis ambitibus sicut aqua, oleum vel pulvis.
n Inductio magnetica debilis calces magnetizari prohibet, et superficies encoder limaturas ferreas non facile adsorbit.
n Magnae tolerantiae ad aer- hiatum et institutionem positio cum summus sensus TMR sensoriis
n Convexum et concavum genus indicem dentium concessum est
Electrical Parameters
| SYMBOL | PARAMETRUM NAME | PRETIUM | NOTA |
| Vcc | Supple intentione | 5±10%V | DC |
| Lout | Output Current | ≤20mA | Non Load |
| Vout | Output signum | peccatum/cos (1Vpp±10%) |
|
| Fin | Input Frequency | ≤1M Hz |
|
| Fout | Output Frequency | ≤1M Hz |
|
|
| Phase | 90°±5% |
|
|
| Calibration Methodus | Manual |
|
|
| Nulla Resistentia | 10MΩ | DC500V |
|
| sustinere intentione | AC500 V | 1 Min |
|
| EMC Group Pulsus | 4000 V |
Mechanica Parametri
| SYMBOL | PARAMETRUM NAME | PRETIUM | NOTA |
| D | Spatium inter Adscendens pertusum | 27mm | Per duos M4 ANISOCYCLUM |
| Gap | Adscendens Air-gap | 0.2/0.3/0.5mm | Respondentem 0.4/0.5/0.8- modulus respectively |
| Tol | Adscendens Tolerantia | ±0.05mm |
|
| To | Temperature operating | -40~100°C |
|
| Ts | Repono Temperature | -40~100°C |
|
| P | Praesidium Gradus | IP68 | Cadmiae offensionis habitationem, plene potted |
Suspendisse Apparatus Morbi
| SYMBOL | PARAMETRUM NAME | PRETIUM | NOTA |
| M | Apparatus amet | 0.3~1.0mm |
|
| Z | Numerus dentium | nullus modus |
|
| δ | Latitudo | Min.10mm | Suadeo 12mm |
|
| Materia | ferromagnetic ferro | Suadeo XLV # ferro |
|
| Index Dentem Shape | convexa / concava dente | Suadeo dens concava |
|
| Dens Latitudo inter duas stratis | 1, 1; | Latitudo indicis dens est 6mm |
|
| Apparatus Accuracy | supra planum ISO8 | Respondentem gradu JIS4 |
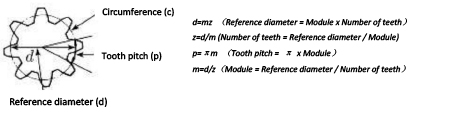
Calculi modus parametri calces:
Output significationibus
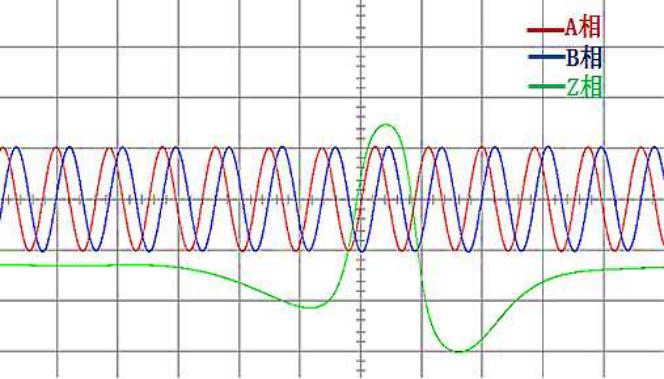
Signi encoder output sunt differentiales sine/sine/cosino cum 1Vpp amplitudine una cum signo indice. Sex sunt terminationes output inter A+/A-/B+/B-/Z+/Z-. A/B sunt duo signa orthogonalia sine/cosino differentiali, et Z signum est signum index.
Sequens chartula differentialis XT significationibus A/B/Z mensuratur.
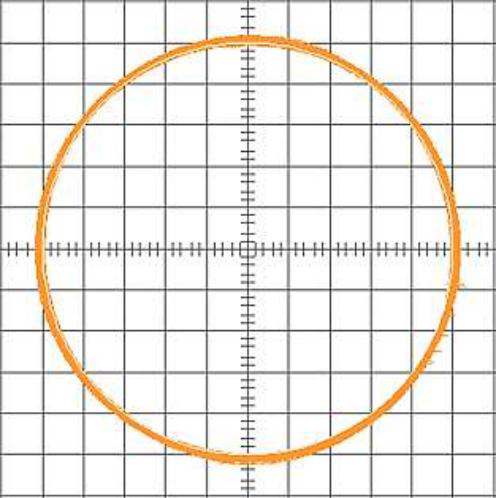
Sequens chartula est Lissajous-Figura XY significationum mensuratarum.
Apparatus amet
Series producta GE-A anni cum 0.3~1.0-modula disposita est, et numerus dentium variari potest.
Sequens tabula ostendit commendationem aeris-rimam sub 0.4/0.5/0.8-module ascendentem.
| Apparatus amet | Adscendens Air-gap | Adscendens Tolerantia |
| 0.4 | 0.2mm | ±0.05mm |
| 0.5 | 0.3mm | ±0.05mm |
| 0.8 | 0.5mm | ±0.05mm |
Numerus dentium
Encoder anniculos aptare debet cum numero dentium pro meliori eventuum numero. Commendatur numerusdentium est 128, 256, vel 512. Minor differentia in dentium numero acceptus est absque affectione qualitatis;ad output annuit.
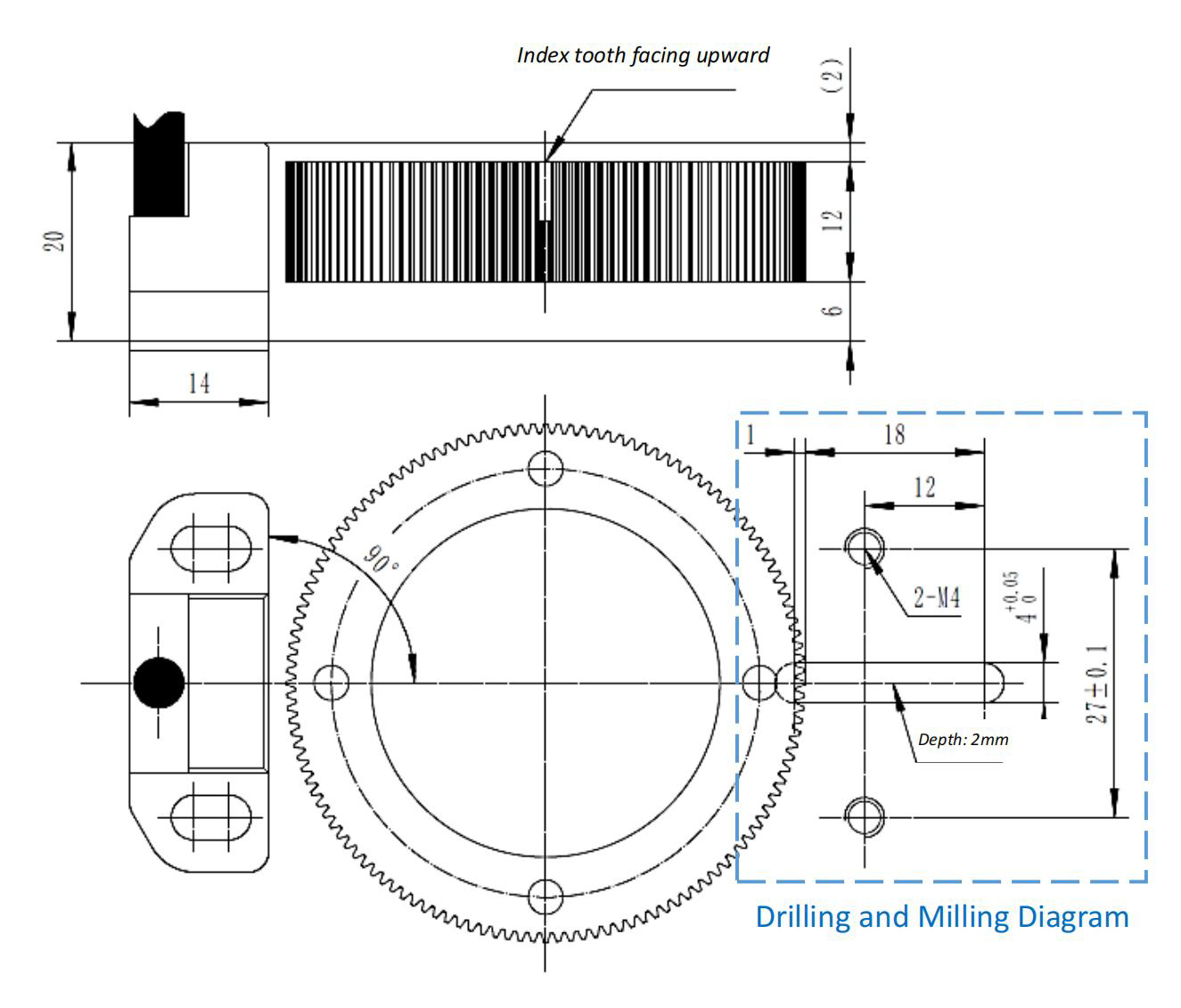
Institutionem De modo procedendi
The encoder notat compactum consilium cum distantia inter duo foramina ascendentium ad 27mm, faciens illumcompatible cum plerisque similibus in foro. Ratio institutionis talis est.
1. Ascende encoder duobus cochleis M4 utens. Cochleas firmiter constringi non debent, ut tamen tionibusadscendens aer-gap.
2. Sentiens METIOR cum desideravit crassitudine media encoder et calces. Movere ad encodercalces donec nullum sit spatium inter encoder, coniecturam sentiens et calces et tangens removeri possunt.leniter extra vim adhibere.
3. Firmiter duas cochleas M4 obstringere, et tangentis METIOR eruere.
Ob facultatem encoder constructi in auto-calibratione, signum output optatum producet dummodo proprium.Ascensus aeris spacium servatur per processum superius in tolerantia.
Cable
Normalis versio encoder cable consistit in octo filis tortis clipeatis. Sectio crucis funemnucleus 0.14mm2, et diametri exterior 5.0± 0.2mm. Funis longitudo est 1m、3m、5m per defaltam.Version encoder funis consectetur constat decem filis tortis clipeatis. Sectio crucis funemnucleus 0.14mm2 , et diametri exterior 5.0± 0.2mm. Funis longitudo est 1m、3m、5m per defaltam.
Dimensiones
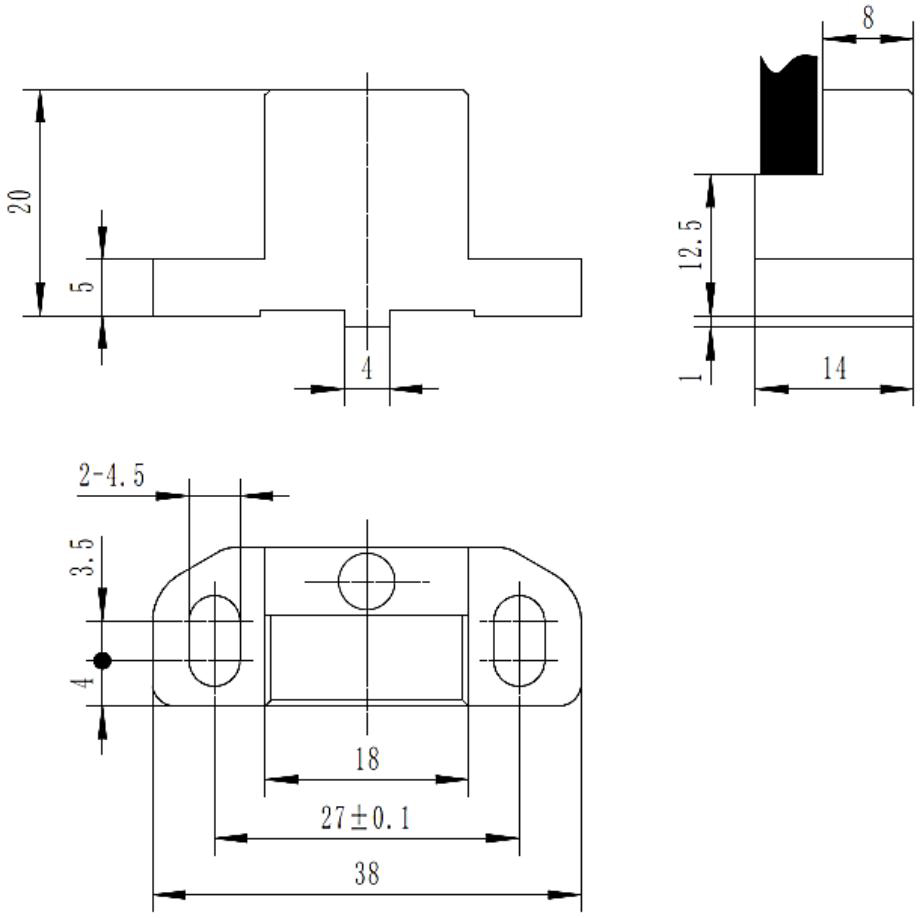
Adscendens Position
Ordo Code

1: Type calces Encoder
2(Gear amet);04:0:4-module 05:0:5-module 0X: 0:X modulus;
III (A:Sin/Cos Type annuit): A:Sin/Cos significationibus;
4 (Interpolatio):1 (per annum);
5(Index Figurarum);F: dens M:convex dente concavo;
6 (Number Dentium);128, 256, 512, XXX;
7(cable Longitudo);1m(standard),3m,5m;
8(Online Debug):1: subsidium, 0: not support;
Informatio in hoc provisum accurate et certa esse creditur. Publicationes nec importat nec importat licentiam sub patentibus aliisve facultatibus industrialibus vel intellectualibus iuribus. Gertech ius reservat mutationibus faciendis specificationibus productis ad augendum productum qualitatem, fidem et functionem. Gertech ex applicatione et usu fructuum eius non accipit debitum. Custumarii Gertecg utentes vel vendentes hoc productum ad usum in adjumenta, machinas, vel systemata ubi rationabiliter expectari potest malfunction ad iniuriam personae provenire in suo periculo facere, et consentire ut Gertech plene indemnitatem pro quibusvis damnis quae ex talibus applicationibus oriuntur.